在竞赛中脱颖而出 - TIS工业相机赞助学生赛车团队到达终点线
由 TIS Marketing 于 2022年2月7日 发表。
受到世界学生赛车(FSAE)启发,清大赛车工厂NTHU Racing 于2015年成立,从零开始,自行设计和制作赛车,参与 FSAE Japan 2018年转型制作电动车,并于隔年勇夺电动车第二名成绩,并获得最佳电子系统设计、效率奖等奖项。近年来,自动驾驶车已成为汽车产业的一大趋势。为求突破,清大学生团队开始自行开发自驾赛车,The Imaging Source 映美精相机 提供DFK 33UX273 相机以及相关配备,协助团队达成目标。
定位及建立地图信息
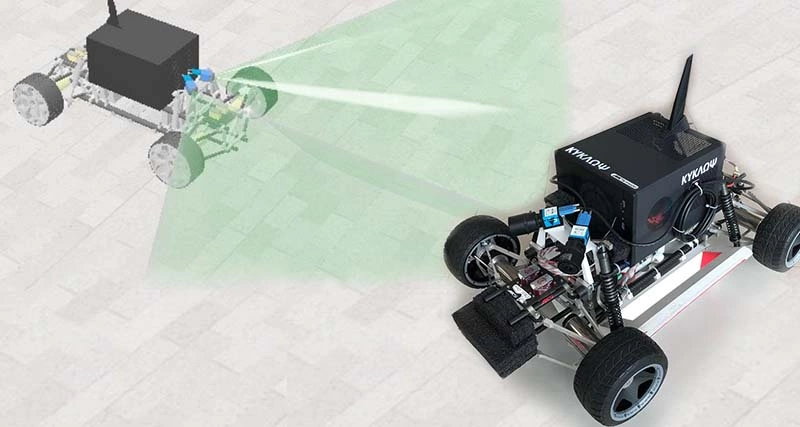
团队先制作一台缩小版赛车(如下图一)来测试硬件以及软件设计,团队目前开发之自驾系统由传感器融合与导航控制两部分构成,由角锥定义之赛道实现对应的定位及导航系统,借此验证软件架构的可行性。 软件验证的方法融合了许多传感器类型的数据,如加速计、ToF以及视觉传感器。 此传感器融合的过程可以达到最佳感测及导航控制。而视觉感测一直是无人车发展组成的一部分,用于可视化环境中的物体,如标志和车道标记,视觉数据也可用于解决任何自动驾驶车面临的另一个基本挑战 ─ 确定自己在三维空间中的位置的能力。
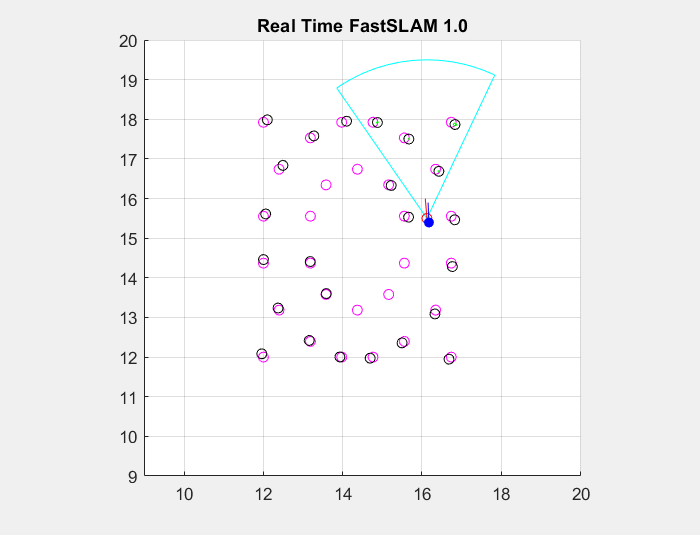
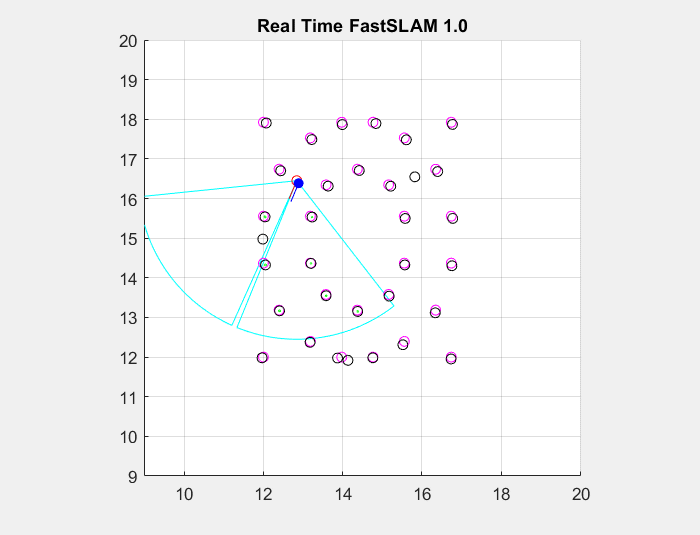
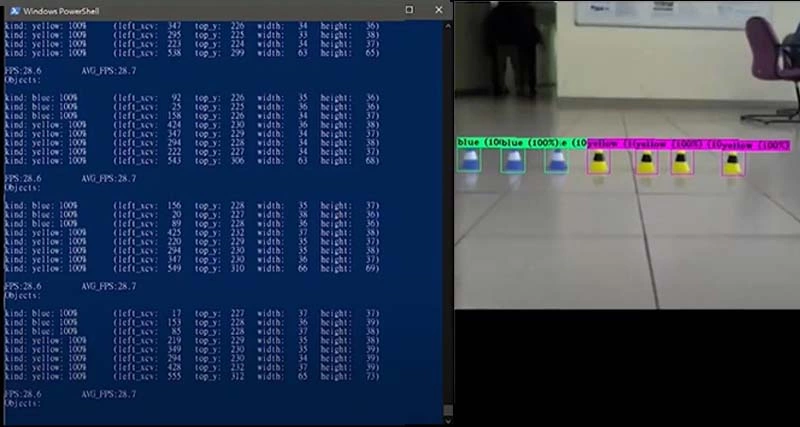
机器视觉辨识一直是自驾车不可或缺的一部分,有如无人车眼睛,帮助赛车在赛道上辨识且避开障碍,畅行无阻。 一开始,学生安装单台USB 3.0 DFK 33UX273工业相机,整合成一个单相机系统。 相机的输入被分析为环境信息(例如黄色和蓝色的角锥--下图二),同时也用于帧对帧的视觉追踪。 相机的连续图像被用来估计相机(车子自身)的实时位置变化,进行单反视觉测距(VO),然后 使用扩展卡尔曼滤波(EKF)和FastSLAM-1.0算法,测量环境的基本结构和几何形状。 然后,这些特征被汇总到一个视觉地图中,以高精度的方式预估汽车的位置(同步定位和建立地图信息 --- SLAM)。
双眼看得比单眼广
在测试过程中,学生团队发现单台相机系统所提供的视野(FoV)还是有点太窄了(下图三a),过程中仍然有一些死角,无法完整辨认全数角锥 。借鉴其他赛车队的经验,学生们决定测试在视觉系统中增加第二个相机,以增加视野并捕捉所有环境障碍物(图三b)。USB 3.0相机快速有效地连接到计算机,将图像信息从相机实时传输到数据库。 经过测试,双相机系统便能成功辨识到所有角锥。